Parkour System






Pitch
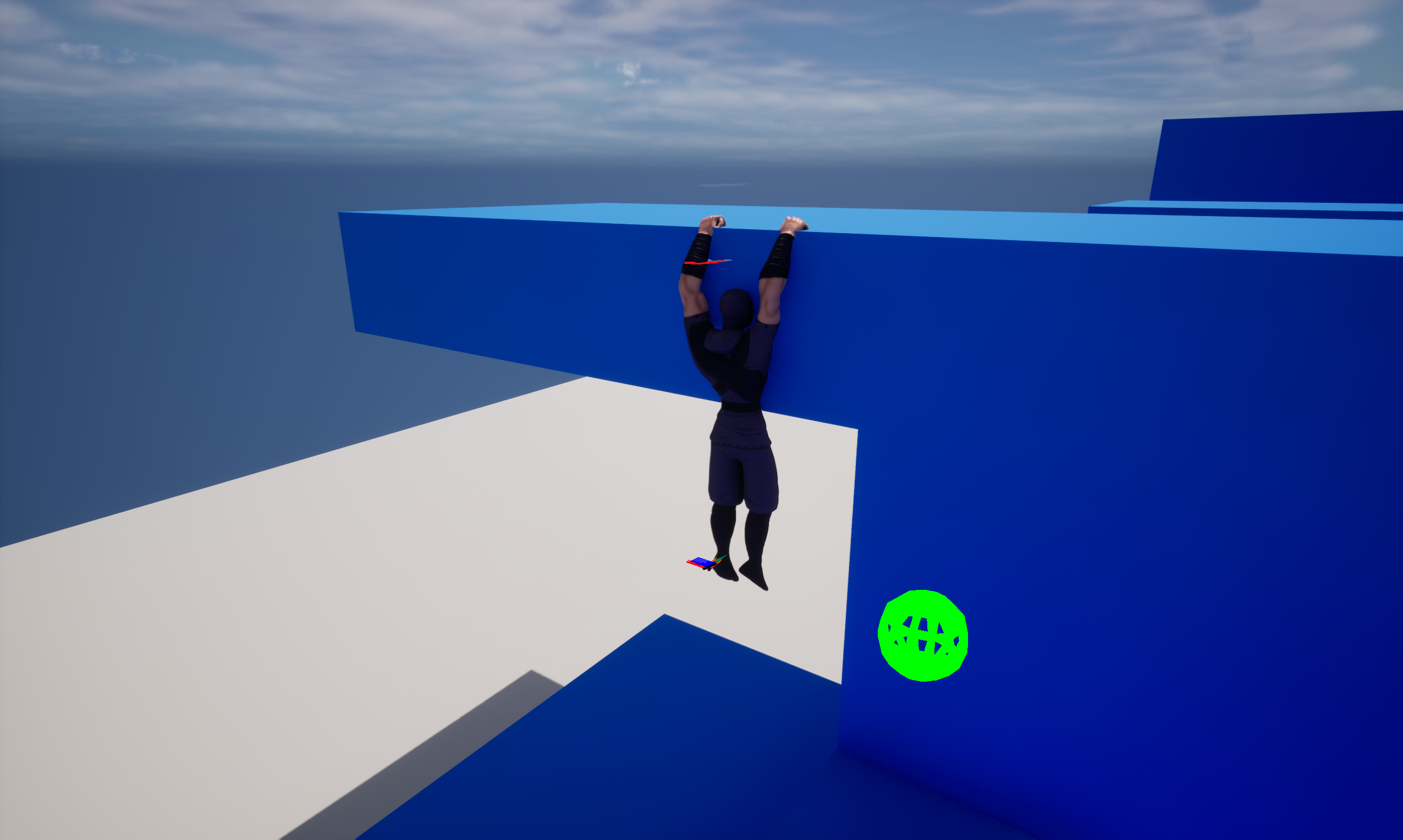
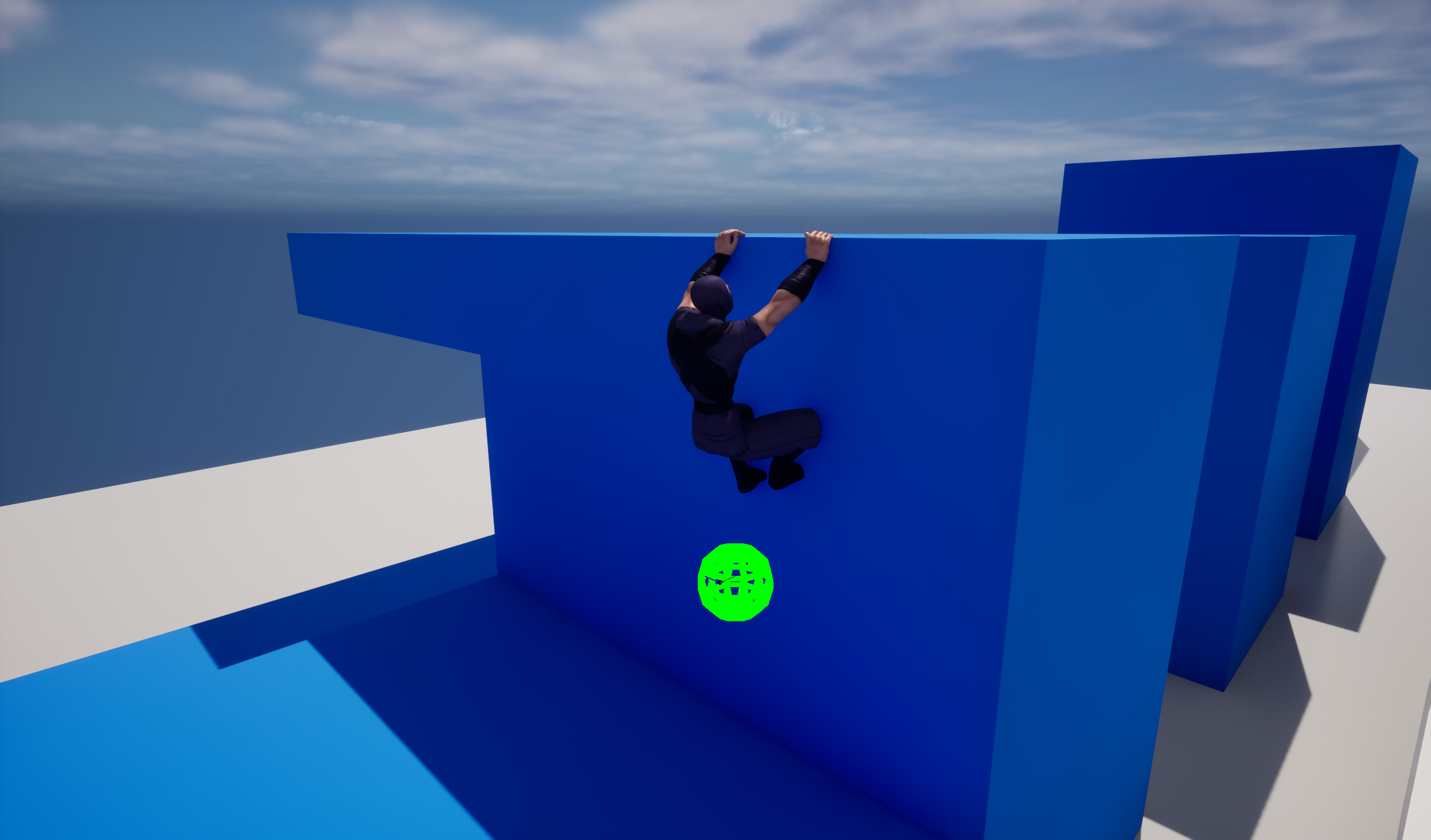
An small infiltration game prototype with a parkour system made to learn about new Unreal Engine animation systems, such as Motion Wrapping and Motion Matching, and AI systems, such as the Perception System.
I gained experiences on how to use Root Motion and Motion Warping with Animation Montage to adapt the animations to the environment, which is useful for a parkour system. I also tested Motion Matching, a new feature of Unreal Engine 5.4, which allowed me to create character movement. Finally, I implemented Inverse Kinematics for the feet of the character.
I've also worked on environment scanning and shape analysis to be able to adapt my animations with different shapes and choose the location of my warping points, but also to choose which actions the character should do.
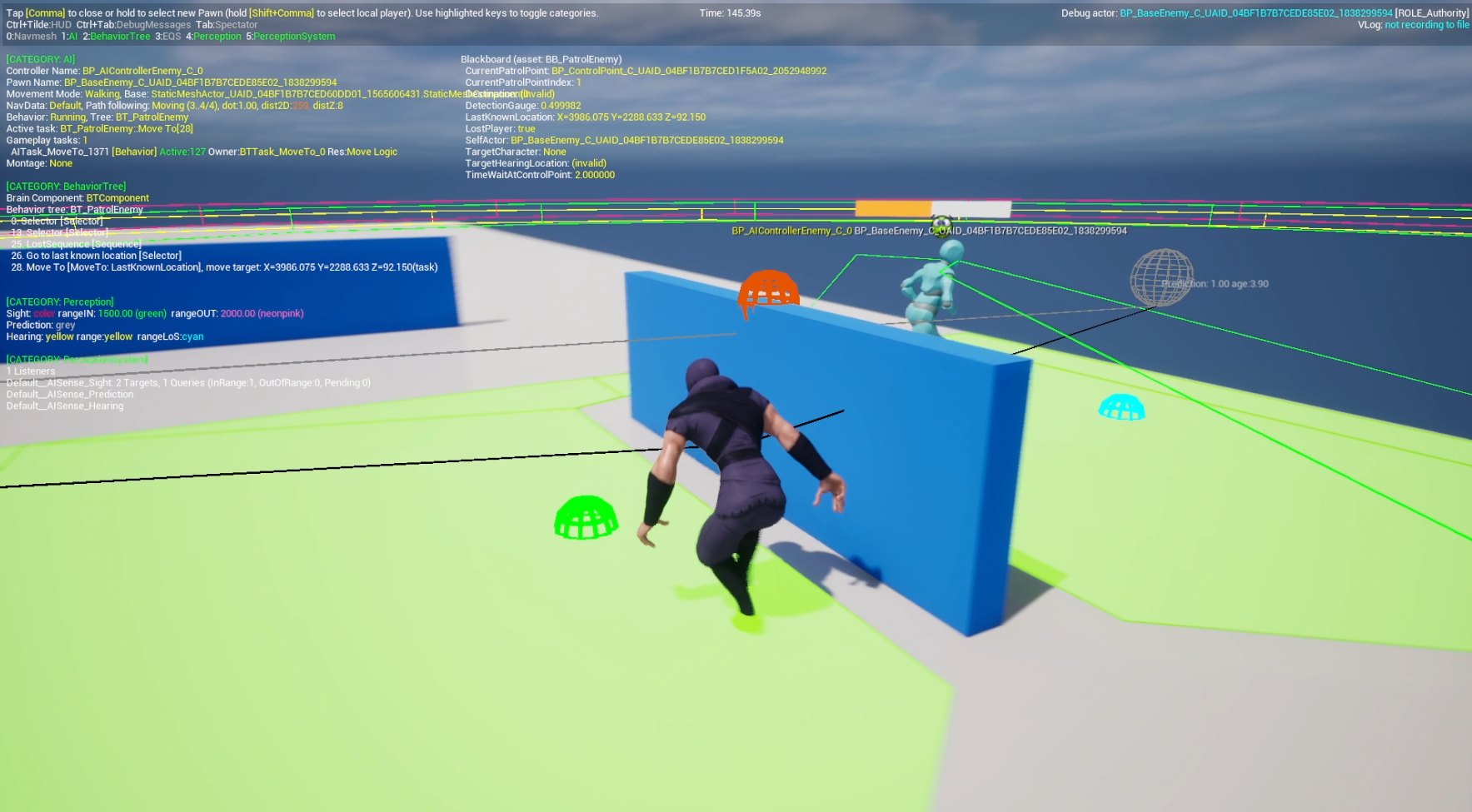
At the end of the project, I quickly worked with Behavior Trees and the perception system of Unreal Engine to create basic enemies. I implemented patrol movement as well as sight, hearing and prediction perceptions to create a small infiltration prototype to test the parkour system. As this project was more focused on the animation part, the AI part has been kept very simple.
My Tasks
- Worked with Animation Blueprint and Animation Montages to implement Parkour Animations.
- Environment scanning and shape analysis
- Implemented Motion Warping and Motion Matching to adapt the animations to the environment
- Implement Inverse Kinematics for player's feet
- Implemented AI enemies with Behavior Tree and the perception system of Unreal Engine 5 (sight, hearing, prediction)
- Research and Development
Information
- Genre:Parkour
- Platform:PC
- Engine:Unreal Engine 5.4
- Duration:2 months • 2025
- Team Size:Solo
- Role:Animation Programmer
- Skills: C++ Unreal Engine Motion Matching Motion Wrapping Animation Blueprint AI Perception Inverse Kinematics